Technical Description of the project
Unmanned aerial vehicles (UAVs) are quickly emerging as a feasible and low-cost technology for use in various indoor applications such as search-and-rescue missions, manufacturing and precision agriculture. These services and applications demand a high autonomy and control dynamics, both of which relies on accurate determination and localization of the unmanned system.
In outdoor environments several global positioning systems are available (GPS, Galileo), with an accuracy of around 5 meters.
Concerning indoors environments, however, GPS signals are typically marginal or unavailable because of signal loss/attenuation caused by obstructions or radio interferences.
Several ranging technologies are available for indoor positioning, but most of them lack in the accuracy for position and rate of position estimation. In our research we wanted to provide a precise and fast localization system for autonomous navigation of UAVs in indoor environments.
In our research we wanted to provide a precise and fast localization system for autonomous navigation of UAVs in indoor environments.
In the first stage of the project, we analyzed several ranging techniques such as Wi-Fi, CSS (Chirp Spread Spectrum), UWB (Ultra-Wide Band). Based on our experiments, we found that the Wi-Fi and CSS are affected by a considerable multipath effect (that typically provides an over-estimation of the distance between two sensors) resulting in a poor quality of the position estimation (through trilateration). UWB, instead, provides the best performance in terms of accuracy. But the typical rate with which the UWB provides a position estimation is not enough to allow a fast refresh of the position estimate. We also found that another important drawback of the UWB technology is a lower accuracy on vertical axis, compared to the horizontal plane, mainly caused by the reflection of the UWB signal on the ground. On the other side, inertial sensors provide a fast position estimation rate but with an error growing exponentially over the time.
Because of the need to provide precise and fast localization of unmanned systems in indoor environments, in this project we investigated the use of Ultra-WideBand technology, in conjunction with inertial sensors and vision sensors, for the development of high-accuracy and high-rate localization algorithms. We wanted to overcome the limitation in the position rate of the UWB exploiting the fast rate of inertial sensors. In addition, we wanted to limit the error growth of inertial based position estimation using the range measurements provided by the UWB system.
Based on our experimental results, we found that the integration of UWB with inertial data and vision data as additional aiding in the sensor fusion algorithm overcame the limitations of UWB and allowed a centimeter-level precision position-estimation necessary to carry out the critical task of autonomous landing.
The obtained results show that an accuracy of 10 cm in position estimation can be achieved. 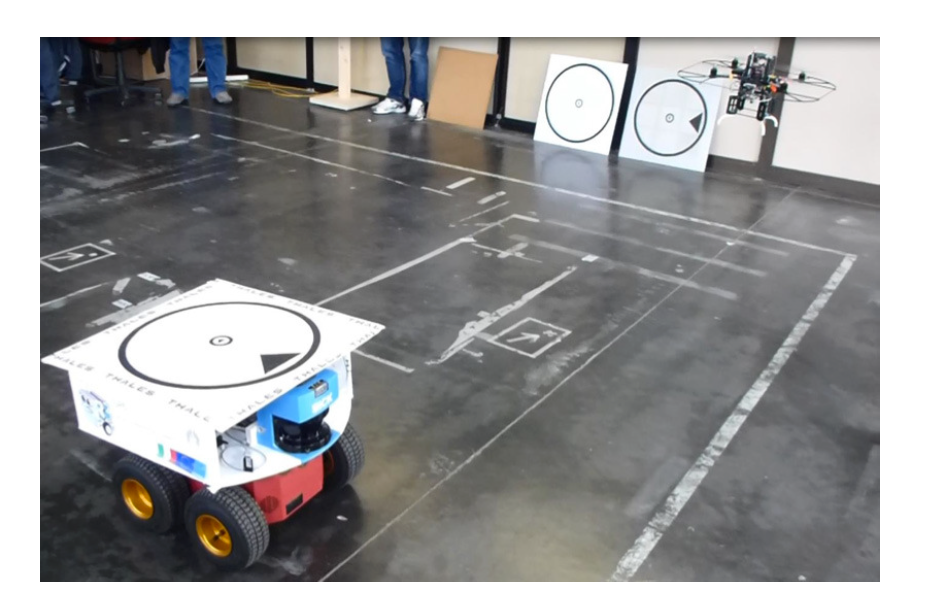 Localization algorithms based on Extended Kalman Filter have been developed on real hardware and successfully tested in real scenarios. Some of the proposed models focus on the estimation of inertial sensor errors (such as accelerometers and gyroscopes biases) using the high accuracy of UWB technology. The combination of high flexibility, lower operating/maintenance costs and small dimensions could allow unmanned vehicles to provide a successful aid in several areas such as urban infrastructure management, farming, and oil and gas exploration to name a few. New applications of Unmanned vehicles come out every day. Localization and navigation or UAV is a critical aspect for several reasons, but most importantly is the basis for fully autonomous systems. In this project, the combination of Ultra-WideBand technology, inertial sensors and vision for indoor localization and navigation, has been successfully demonstrated throughout extensive field testing.This work is part of the European Research Project Artemis R3-COP, funded by the Artemis Consortium. Thales Italia S.p.A. was one of the 30 European partners of the R3-COP project. Polytechnic University of Marche was sub-partner of Thales Italia S.p.A. Partners of the R3-COP project are from both academic and industrial worlds.
Localization algorithms based on Extended Kalman Filter have been developed on real hardware and successfully tested in real scenarios. Some of the proposed models focus on the estimation of inertial sensor errors (such as accelerometers and gyroscopes biases) using the high accuracy of UWB technology. The combination of high flexibility, lower operating/maintenance costs and small dimensions could allow unmanned vehicles to provide a successful aid in several areas such as urban infrastructure management, farming, and oil and gas exploration to name a few. New applications of Unmanned vehicles come out every day. Localization and navigation or UAV is a critical aspect for several reasons, but most importantly is the basis for fully autonomous systems. In this project, the combination of Ultra-WideBand technology, inertial sensors and vision for indoor localization and navigation, has been successfully demonstrated throughout extensive field testing.This work is part of the European Research Project Artemis R3-COP, funded by the Artemis Consortium. Thales Italia S.p.A. was one of the 30 European partners of the R3-COP project. Polytechnic University of Marche was sub-partner of Thales Italia S.p.A. Partners of the R3-COP project are from both academic and industrial worlds.
Significance of the Work
The combination of high flexibility, lower operating/maintenance costs and small dimensions could allow unmanned vehicles to provide a successful aid in several areas such as urban infrastructure management, farming, and oil and gas exploration to name a few. New applications of Unmanned vehicles come out every day. Localization and navigation or UAV is a critical aspect for several reasons, but most importantly is the basis for fully autonomous systems. In this project, the combination of Ultra-WideBand technology, inertial sensors and vision for indoor localization and navigation, has been successfully demonstrated throughout extensive field testing.
Papers related to this project
- Benini, A. Mancini, E. Frontoni, P. Zingaretti, S. Longhi: “Adaptive extended kalman filter for indoor/outdoor localization using a 802.15.4a wireless network”. In: Proceedings of the 5th European Conference on Mobile Robots ECMR 2011, pp. 315–320 (2011).
- Benini, A. Mancini, A. Marinelli, and S. Longhi, “A Biased Extended Kalman Filter for Indoor Localization of a Mobile Agent Using Low-Cost IMU and UWB Wireless Sensor Network Robot Control”, in 10th IFAC Symposium on Robot Control. IFAC, 2012.
- Benini, A. Mancini, S. Longhi: “An IMU/UWB/Vision-based Extended Kalman Filter for Mini-UAV Localization in Indoor Environment using 802.15. 4a Wireless Sensor Network”. Journal of Intelligent and Robotics Systems 70(1-4), 461–476 (2013).
- Cocchioni, V. Pierfelice, A. Benini, A. Mancini, E. Frontoni, P. Zingaretti, G. Ippoliti, and S. Longhi, “Unmanned ground and aerial vehicles in extended range indoor and outdoor missions.”, in Unmanned Aircraft Systems (ICUAS), 2014 International Conference on, May 2014, pp. 374–382.